数字图像
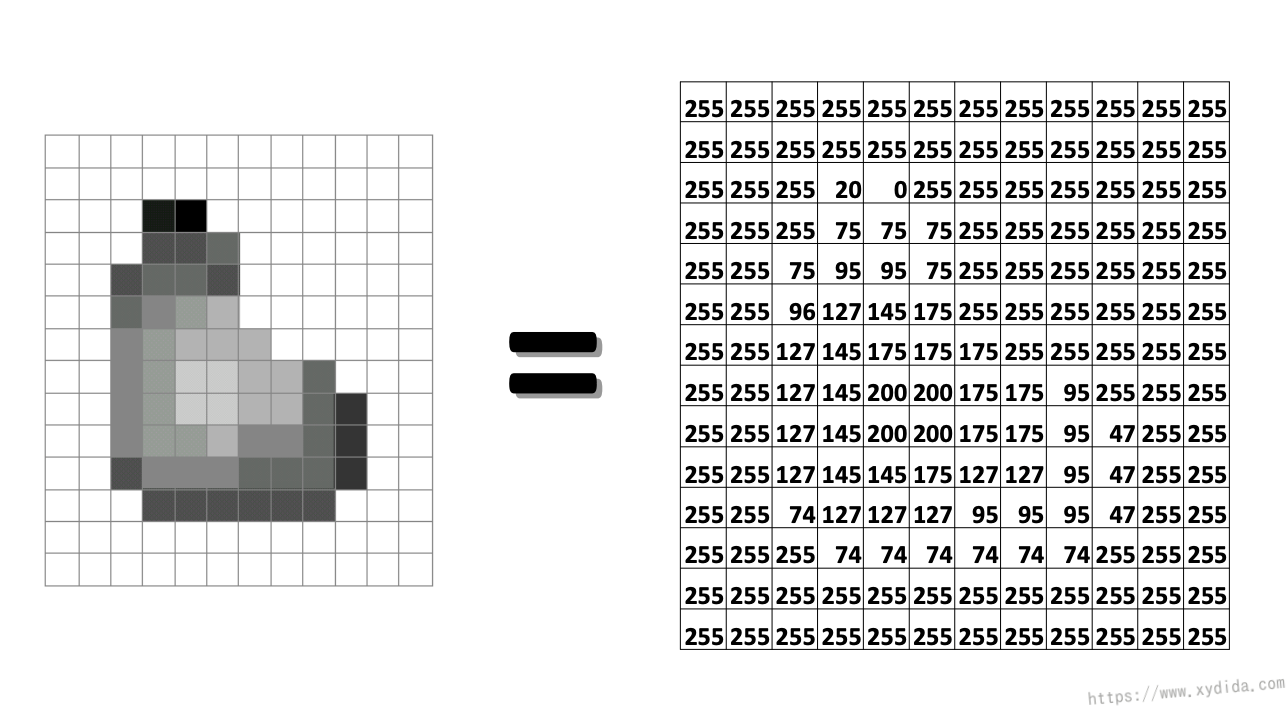
计算机视觉的主要任务就是分析数字图像,计算机中图像是以像素的形式构成方形的光栅(raster),常见的8位深度的图像中,0代表黑色,255代表白色,如上图是一张8位深度的灰度图(greyscale),可以将一个光栅图看作一个函数f(x,y),参数为横纵坐标,输出结果就是像素的值即强度。
三个光栅构成彩色图像,其中光栅也称为通道,分别是红(Red),绿(Green),蓝(Blue)。
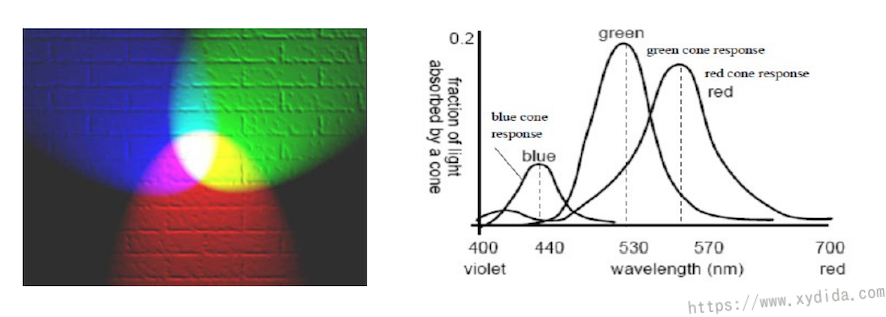
可以使用如下公式将RGB图像转换成Greyscale图像:
从公式中,各部分的洗漱代表了人眼对三种颜色的响应,绿光和红光相同的强度下,人眼会感觉绿色更亮一点,差不多是红色的2倍。上述转换使用Matlab代码如下:
1 | image = imread('pic.jpg'); |
图像处理就是一种变换(transform)
图像处理任务可以看作是将原有的f(x,y)变换成新的函数g(x,y)的过程,比较常用的就是线性变换,如下图:
线性变换有如下优点:
- 实用,可以检测边缘,细节锐化,降噪等
- 配合卷积算子,效率高
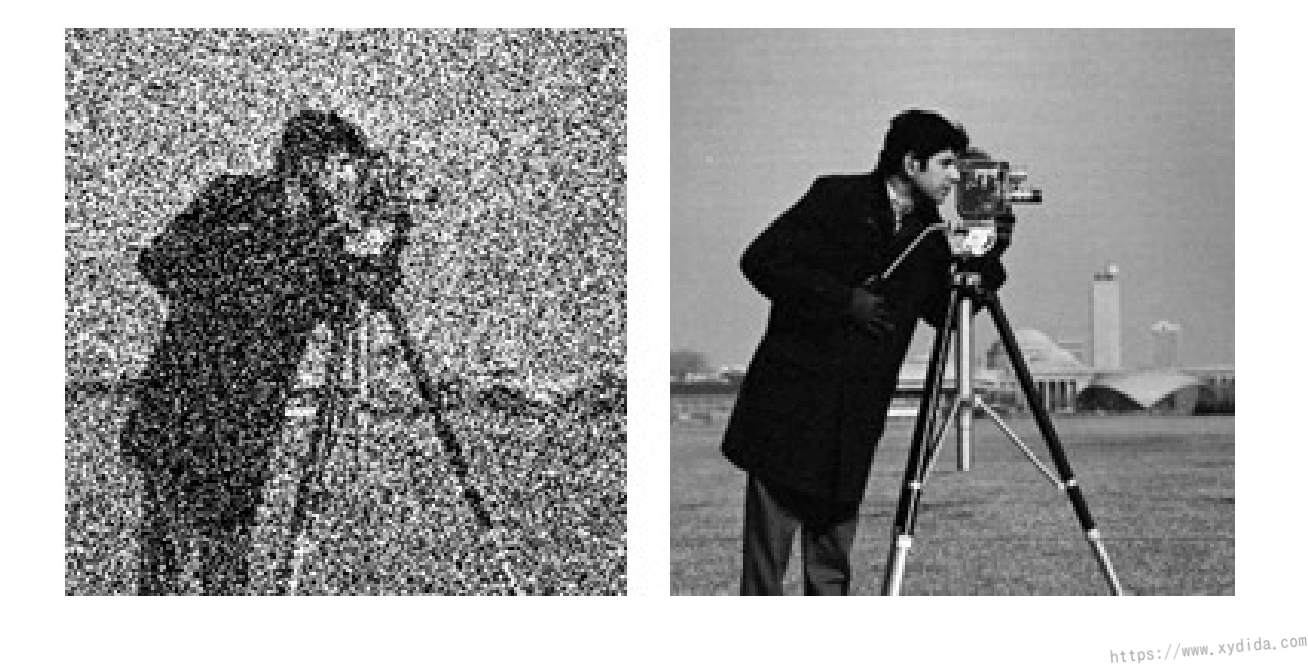
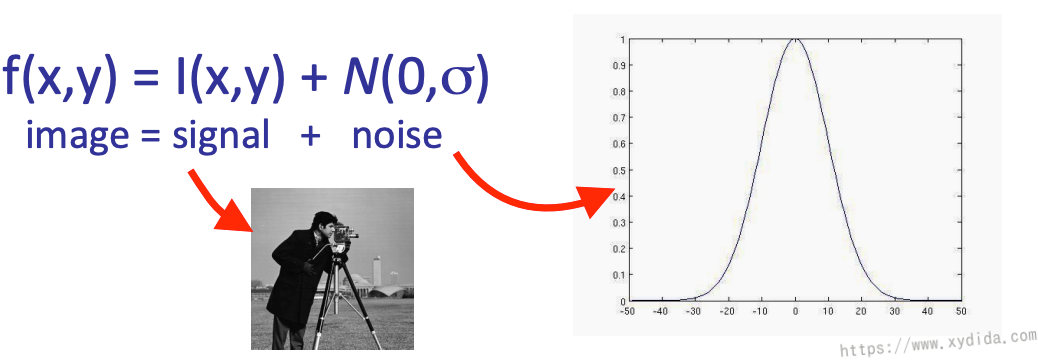
图像降噪是线性过滤器最常见的应用之一,图像的噪点类型多样,常见的"speckling"是一种热噪声,也是高斯噪声的一种,一些廉价相机在低光环境下拍出的照片通常都会有这种噪声。
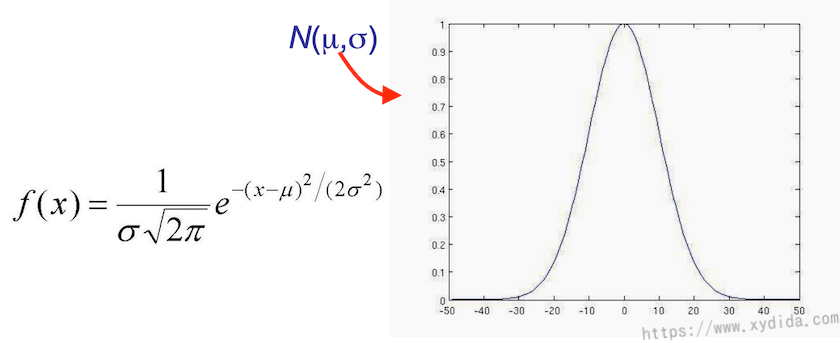
高斯噪声可以想象成在原始像素值上多加上一点,噪声值的分布是一个高斯分布,如下图,均值为0,标准差为10。
降噪
多图像
如果我们将相机固定在一个位置,拍了n张一样的图,但由于一些细微因素的影响,这n张图片的像素值不可能完全一样,因为一张图片的生成包含了原始图像信号和噪声信号:
平均法是将这n张图片的每个像素值取平均,最终得到一张更清晰的图像,由于高斯噪声的均值是0,所以当照片的数量越多,n越大,平均后得到的噪声就越小,如下图:
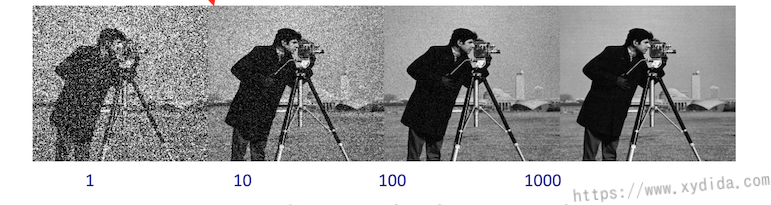
此方法需要很多张图像来获得好的效果,卫星拍照领域广泛使用,但平时生活中使用较少。
单张图片
正常情况下,只有一张带有噪声的图片,由于空间连贯性(spatial coherence),相邻像素强度是类似的,可以将像素分组,使用滑动窗口在每一组内取平均作为新的像素值,也可以起到去噪的效果,如下图:
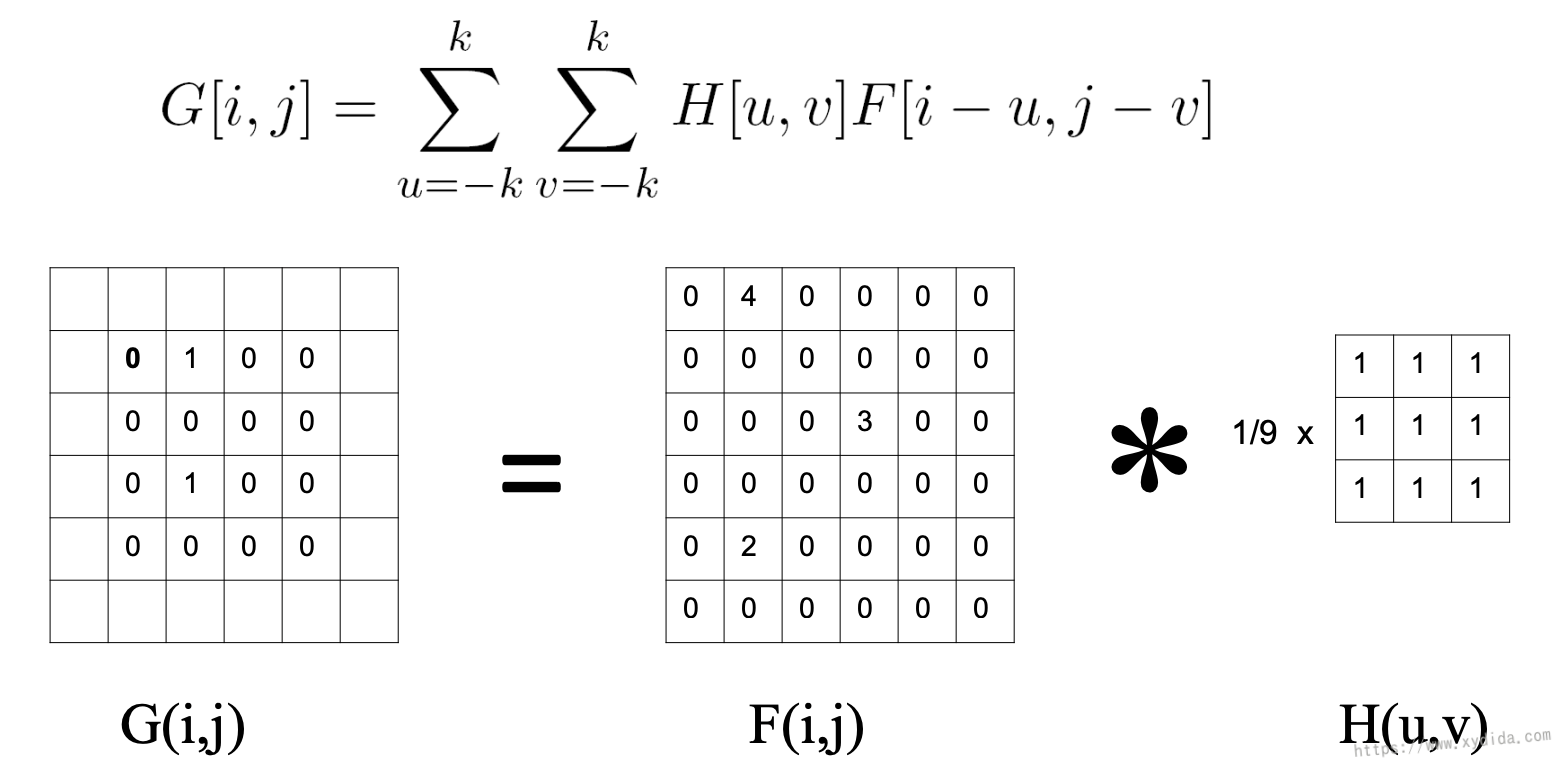
一种高效的组内平均方法是使用卷积算子,如果滑动窗口大小为3x3,则卷积算子如下:
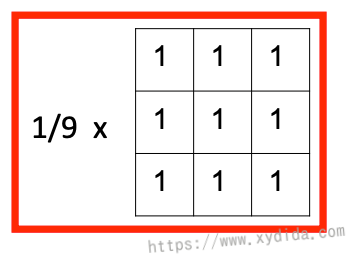
操作起来就是将算子的每一个元素与窗口内对应的元素相乘,最后相加后结果四舍五入:
卷积
上面的例子可以知道,我们通过一个卷积算子能将图像f(x,y)转换成g(x,y),通过线性组合周围像素的方式就叫做线性过滤,卷积算子的每个元素为对应像素的权重。
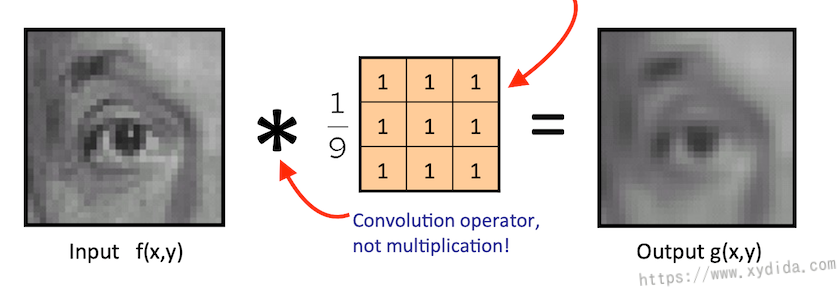
不同的算子权重可以创建处不同效果的图像,上例中每个权重都是1/9即取周围9个像素像素的均值,最后生成的图片更加模糊。下面是带有不同权重的算子:
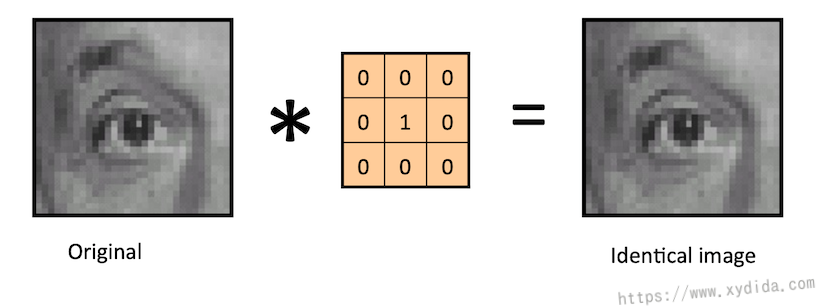
结果和原始图像一样:
图片向左移动一个像素:
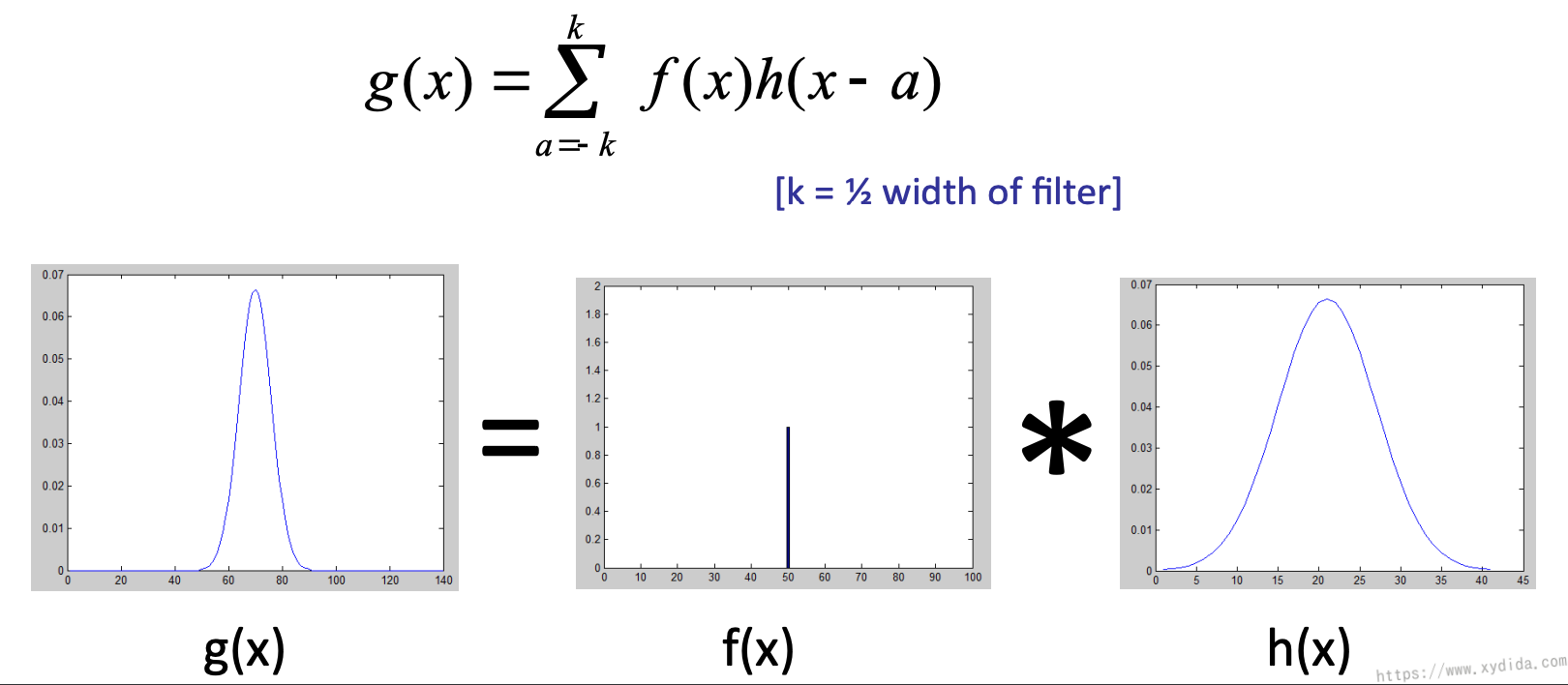
一维数据卷积
f(x)为输入信号,h(x)为过滤器:
二维数据卷积
图像模糊(blurring)
上面图像去噪的例子中,是采用平均周围像素的方式,每个算子的大小都是一样的,又称作“Box filter”,可视化如下图:
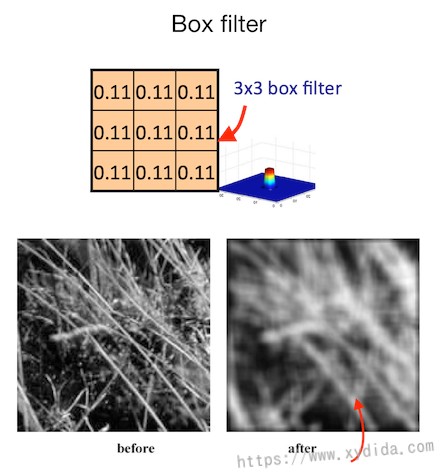
从结果来看,虽然是模糊的,但是图像不够顺滑,细看像一块一块的方块组成。如果换成使用高斯函数生成算子权重,即中间权重大,周围权重小,则结果会很平滑:
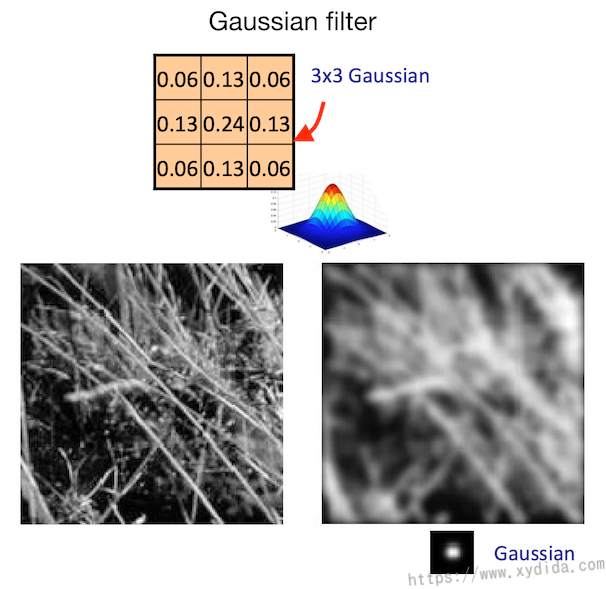
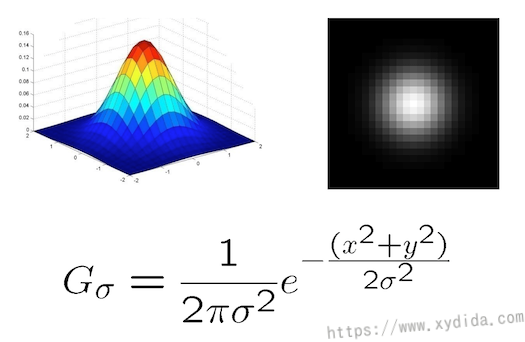
高斯算子通过高斯函数生成,选择一个固定的标准差,参数x,y为距离中心点的偏移量,离中心的越远,生成的权重越小,因为spatial coherence的原因,距离越远,相关性就越小,
边缘检测
线性过滤器也可以用于边缘检测,在图像中,边缘发生在强度不连续的地方,可以使用高通过滤器(high pass filter)来检测。
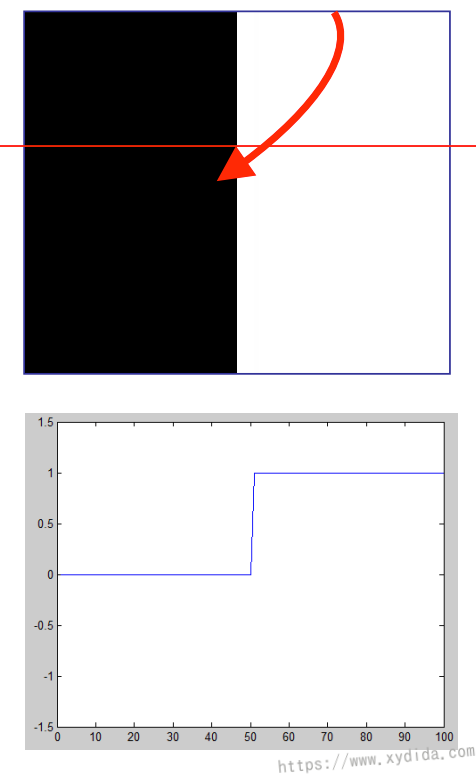
如上图,黑白中间即边所在,下面的强度图可以看到由黑到白时,强度发生了巨大的跳变,但是真实的图像中,这种变化往往不会这么明显,会稍微柔和一点。边缘分为水平和垂直方向,水平方向变化的边需要计算水平梯度(gradient),反之需要计算垂直梯度,图像梯度指向强度变化最快的方向。
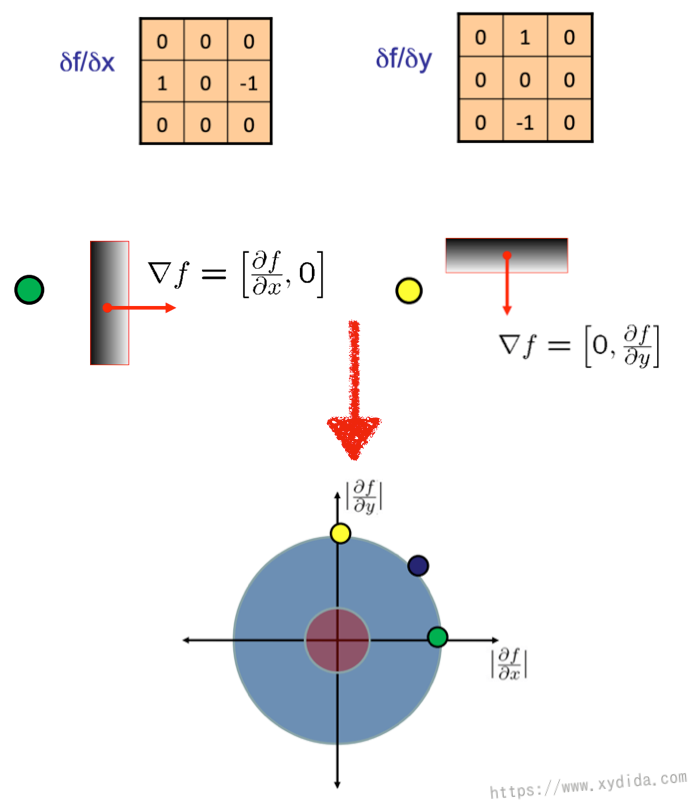
边又两个属性,分别是图像梯度和方向,可以分别通过公式1和公式2计算出来:
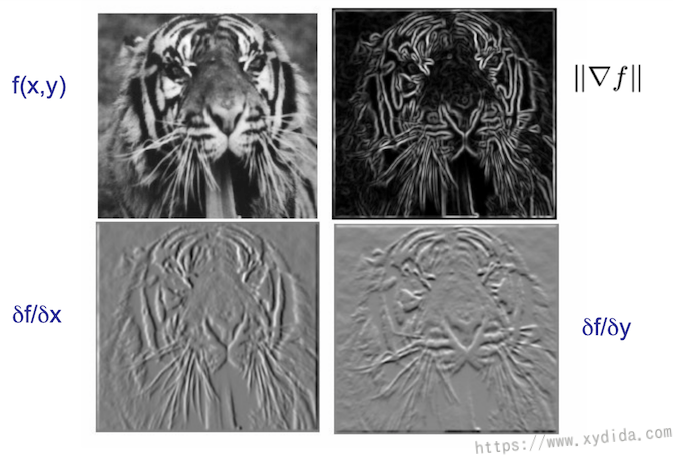
如下,是一只老虎的梯度图:
Sobel边缘算子
Sobel经常被用来检测边缘,同时它还有平滑图像的功能,算子如下:
